LogDynamics
Projekte
School
Lab
LDIC
Forschungsprogramm
Struktur
Teilprojekte
Demonstratoren
Allgemeines
Transport-Logistik
Automobil-Logistik
Intelligenter Container
Produktions-Logistik
Graduiertenkolleg
Mitglieder
Kooperationen
Veranstaltungen
Publikationen
Public Relations
Stellenangebote
Links
Kontakt
Suche
Deutsch <
> English
SFB 637
>>
Demonstratoren
>>
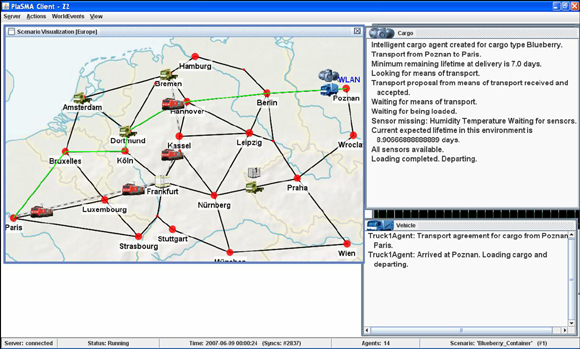
Intelligenter Container
Intelligenter Container und selbststeuernde Routenplanung
Der Imagefilm zum Demonstrator ist
hier
www.intelligentcontainer.com