

This scenario depicts a logistical network with 7 nodes (towns) and 9 edges (routes), on which transport goods (e.g. automobiles, parcels, foodstuffs) and means of transport (freight vehicles), in part represented by model cars in a 1:16 scale and in part by humans, as actors in the scenarios. It is the task of the freight vehicles to deliver parcels from node A to node B. The transport goods (participants in the scenario) can select target destinations by entering the appropriate data in their PDA.
Transport Logistics

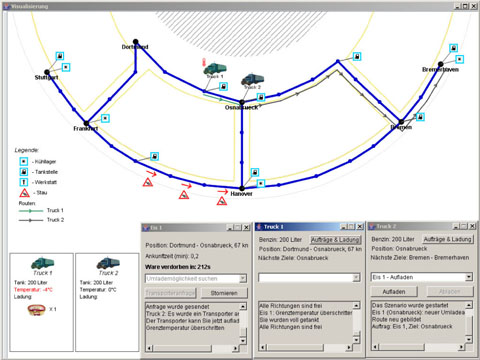
The entire structure of the demonstration scenario has been visualised; this enables the visitor to follow the events on a large screen and to gain a perspective on the extent of information exchange taking place during the course of events.
